



References
[1] M. Richards, M. A. Richards, J. A. Scheer, and W. A. Holm, Principles of Modern Radar: Basic Principles. Institution of Engineering and Technology, 2010.
[2] W. D. Jones, “Keeping cars from crashing,” IEEE Spectr., vol. 38, no. 9, pp. 40–45, Sept. 2001.
[3] E. Guizzo, “How Google’s self-driving car works,” IEEE Spectr. Online, vol. 18, Oct. 2011.
[4] H. H. Meinel, “Evolving automotive radar: From the very beginnings into the future,” in Proc. European Conf. Antennas and Propagation, Hague, The Netherlands, 2014, pp. 3107–3114.
[5] S. Kobashi, et al., “3D-Scan radar for automotive application,” in Proc. ITS World Congr., Vienna, Austria, 2012, vol. 38, pp. 3–7.
[6] I. Gresham, N. Jain, T. Budka, A. Alexanian, N. Kinayman, B. Ziegner, S. Brown, and P. Staecker, “A compact manufacturable 76-77-GHz radar module for commercial ACC applications,” IEEE Trans. Microwave Theory Tech., vol. 49, no. 1, pp. 44–58, Jan. 2001.
[7] D. M. Grimes and T. O. Jones, “Automotive radar: A brief review,” Proc. IEEE, vol. 62, no. 6, pp. 804–822, June 1974.
[8] J. Wenger, “Automotive radar: Status and perspectives,” in Proc. IEEE Compound Semiconductor Integrated Circuit Symp., Palm Springs, CA, 2005, pp. 21–25.
[9] F. Fölster and H. Rohling, “Signal processing structure for automotive radar,” Frequenz, vol. 60, no. 1/2, pp. 1–4, 2006.
[10] J. Li and P. Stoica, “MIMO radar with colocated antennas,” IEEE Signal Process. Mag., vol. 24, no. 5, pp. 106–114, Sept. 2007.
[11] J. Yu and J. Krolik, “MIMO multipath clutter mitigation for GMTI automotive radar in urban environments,” in Proc. IET Int. Conf. Radar System, Glasgow, U.K., 2012, pp. 24–24.
[12] J. Hasch, E. Topak, R. Schnabel, T. Zwick, R. Weigel, and C. Waldschmidt, “Millimeter-wave technology for automotive radar sensors in the 77 GHz frequency band,” IEEE Trans. Microwave Theory Tech., vol. 60, no. 3, pp. 845–860, Mar.2012.
[13] M. Soumekh, “Array imaging with beam-steered data,” IEEE Trans. Image Process, vol. 1, no. 3, pp. 379–390, July 1992.
[14] S. Patole and M. Torlak, “Two dimensional array imaging with beam steered data,” IEEE Trans. Image Process, vol. 22, no. 12, pp. 5181–5189, Dec. 2013.
[15] H. Trees, Detection, Estimation, and Modulation Theory, Optimum Array Processing. New York: Wiley, 2001.
[16] H. Rohling and M. M. Meinecke, “Waveform design principles for automotive radar systems,” in Proc. CIE Int. Conf. Radar Systems, Beijing, China, 2001, pp.1–4.
[17] G. Wang, C. Gu, T. Inoue, and C. Li, “Hybrid FMCW-interferometry radar system in the 5.8 GHz ISM band for indoor precise position and motion detection,” in Proc. IEEE Int. Microwave Symp., Seattle, WA, 2013, pp. 1–4.
[18] B. Donnet and I. Longstaff, “Combining MIMO radar with OFDM communications,” in Proc. IEEE European Radar Conf., Manchester, U.K., 2006, pp. 37–40.
[19] C. Sturm, T. Zwick, and W. Wiesbeck, “An OFDM system concept for joint radar and communications operations,” in Proc. IEEE Vehicular Technology Conf., Barcelona, Spain, 2009, pp. 1–5.
[20] C. Sturm, E. Pancera, T. Zwick, and W. Wiesbeck, “A novel approach to OFDM radar processing,” in Proc. IEEE Radar Conf., Pasadena, CA, 2009, pp. 1–4.
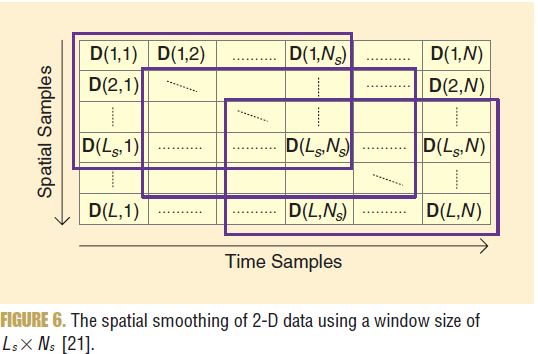
[21] F. Belfiori, W. van Rossum, and P. Hoogeboom, “Application of 2D MUSIC algorithm to range-azimuth FMCW radar data,” in Proc. European Radar Conf., Amsterdam, 2012, pp. 242–245.
[22] H. Akaike, “A new look at the statistical model identification,” IEEE Trans. Automat. Control, vol. 19, no. 6, pp. 716–723, Dec. 1974.
[23] J. Rissanen, “Modeling by shortest data description,” Automatica, vol. 14, no. 5, pp. 465–471, 1978.
[24] R. Schmidt, “Multiple emitter location and signal parameter estimation,” IEEE Trans. Antenna Propagat., vol. 34, no. 3, pp. 276–280, Mar. 1986.
[25] R. Roy and T. Kailath, “ESPRIT-estimation of signal parameters via rotational invariance techniques,” IEEE Trans. Acoust. Speech Signal Process., vol. 37, no. 7, pp. 984–995, July 1989.
[26] H. Krim and M. Viberg, “Two decades of array signal processing research: The parametric approach,” IEEE Signal Process. Mag., vol. 13, no. 4, pp. 67–94, July 1996.
[27] J. Odendaal, E. Barnard, and C. Pistorius, “Two-dimensional superresolution radar imaging using the MUSIC algorithm,” IEEE Trans. Antennas Propagat., vol. 42, no. 10, pp. 1386–1391, Oct. 1994.
[28] M. D. Zoltowski, G. M. Kautz, and S. D. Silverstein, “Beamspace Root- MUSIC,” IEEE Trans. Signal Process., vol. 41, no. 1, pp. 344–364, Jan. 1993.
[29] S. Patole and M. Torlak, “Fast 3D joint superresolution imaging,” submitted for publication.
[30] D. Wang and M. Ali, “Synthetic aperture radar on low power multi-core digital signal processor,” in Proc. IEEE Conf. High Performance Extreme Computing, Waltham, MA, 2012, pp. 1–6.
[31] E. Fishler, A. Haimovich, R. Blum, D. Chizhik, L. Cimini, and R. Valenzuela, “MIMO radar: An idea whose time has come,” in Proc. IEEE Radar Conf., Philadelphia, PA, 2004, pp. 71–78.
[32] A. M. Haimovich, R. S. Blum, and L. J. Cimini, “MIMO radar with widely separated antennas,” IEEE Signal Process. Mag., vol. 25, no. 1, pp. 116–129, Dec. 2008.
[33] S. Lutz, K. Baur, and T. Walter, “77 GHz lens-based multistatic MIMO radar with colocated antennas for automotive applications,” in IEEE Microwave Symp. Dig., Montreal, Canada, 2012, pp. 1–3.
[34] F. Gini, A. De Maio, and L. Patton, Waveform Design and Diversity for Advanced Radar Systems. London: Institution of Engineering and Technology, 2012.
[35] A. Zwanetski and H. Rohling, “Continuous wave MIMO radar based on time division multiplexing,” in Proc. Int. Radar Symp., Warsaw, Poland, 2012, pp. 119–121.
[36] J. D Wit, W. Van Rossum, and A. D Jong, “Orthogonal waveforms for FMCW MIMO radar,” in Proc. IEEE Radar Conf., Kansas City, MO, 2011, pp. 686–691.
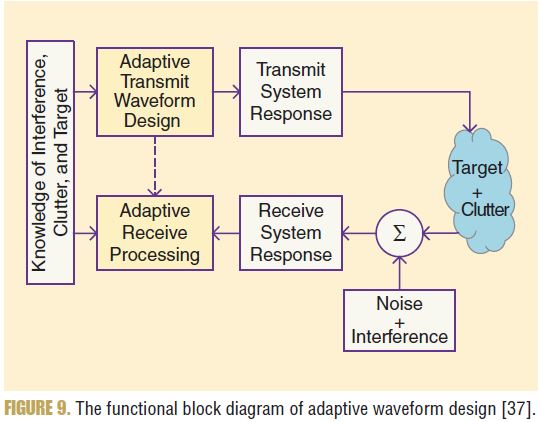
[37] L. K. Patton and B. D. Rigling, “Modulus constraints in adaptive radar waveform design,” in Proc. IEEE Radar Conf., 2008, pp. 1–6.
[38] M. R. Bell, “Information theory and radar waveform design,” IEEE Trans. Inform. Theory, vol. 39, no. 5, pp. 1578–1597, Sept. 1993.
[39] Y. Yang and R. S. Blum, “MIMO radar waveform design based on mutual information and minimum mean-square error estimation,” IEEE Trans. Aerosp. Electron. Syst., vol. 43, no. 1, pp. 330–343, Jan. 2007.
[40] A. Leshem and A. Nehorai, “Information theoretic radar waveform design for multiple targets,” in Proc. Int. Waveform Diversity and Design Conf., Pisa, Italy, 2007, pp. 362–366.
[41] D. Kok and J. S. Fu, “Signal processing for automotive radar,” in Proc. IEEE Int. Radar Conf., Arlington, VA, 2005, pp. 842–846.
[42] H. Rohling, “Radar CFAR thresholding in clutter and multiple target situations,” IEEE Trans. Aerosp. Electron. Syst., vol. 19, no. 4, pp. 608–621, July 1983.
[43] J. Ward, “Space-time adaptive processing for airborne radar,” in Proc. Int. Conf. Acoustics, Speech and Signal Processing, London, U.K., 1995, vol. 5, pp. 2809–2812.
[44] M. C. Wicks, M. Rangaswamy, R. Adve, and T. B. Hale, “Space-time adaptive processing: A knowledge-based perspective for airborne radar,” IEEE Signal Process. Mag., vol. 23, no. 1, pp. 51–65, Jan. 2006.
[45] V. F. Mecca, D. Ramakrishnan, and J. L. Krolik, “MIMO radar space-time adaptive processing for multipath clutter mitigation,” in Proc. IEEE Workshop Sensor Array and Multichannel Processing, Waltham, MA, 2006, pp. 249–253.
[46] A. Macaveiu, A. Campeanu, and I. Nafornita, “Kalman-based tracker for multiple radar targets,” in Proc. Int. Conf. Communication, Bucharest, Romania, 2014, pp. 1–4.
[47] S. M. Kay, Fundamentals of Statistical Signal Processing: Estimation Theory. Upper Saddle River, NJ: Prentice-Hall, 1993.
[48] M. Z. Ikram and M. Ali, “3-D object tracking in millimeter-wave radar for advanced driver assistance systems,” in Proc. IEEE Global Conf. Signal and Information Processing, Austin, TX, 2013, pp. 723–726.
[49] A. Macaveiu and A. Câmpeanu, “Automotive radar target tracking by Kalman filtering,” in Proc. Int. Conf. Telecommunication Modern Satellite, Cable and Broadcasting Services, Nis, Serbia, 2013, vol. 2, pp. 553–556.
[50] D. Oprisan and H. Rohling, “Tracking systems for automotive radar networks,” in Proc. RADAR, Edinburgh, U.K., 2002, pp. 339–343.
[51] N. Floudas, A. Polychronopoulos, and A. Amditis, “A survey of filtering techniques for vehicle tracking by radar-equipped automotive platforms,” in Proc. IEEE Int. Conf. Information Fusion, Philadelphia, PA, 2005, vol. 2, pp. 1436–1443.
[52] V. C. Chen, F. Li, S. S. Ho and H. Wechsler, “Micro-Doppler effect in radar: Phenomenon, model, and simulation study,” IEEE Trans. Aerosp. Electron. Syst., vol. 42, no. 1, pp. 2–21, Jan. 2006.
[53] H. Rohling, S. Heuel, and H. Ritter, “Pedestrian detection procedure integrated into an 24 GHz automotive radar,” in Proc. IEEE Radar Conf., Washington, DC, 2010, pp. 1229–1232.
[54] N. Yamada, Y. Tanaka, and K. Nishikawa, “Radar cross section for pedestrian in 76 GHz band,” in Proc. IEEE European Microwave Conf., Paris, France, 2005, vol. 2, pp. 4–8.
[55] D. M. Gavrila, “Sensor-based pedestrian protection,” IEEE Intell. Syst., vol. 16, no. 6, pp. 77–81, 2001.
[56] M. Bertozzi, A. Broggi, A. Fascioli, A. Tibaldi, R. Chapuis, and F. Chausse, “Pedestrian localization and tracking system with Kalman filtering,” in Proc. IEEE Intelligent Vehicles Symp., Detroit, MI, 2004, pp. 584–589.
[57] L. Ding, M. Ali, S. Patole, and A. Dabak, “Vibration parameter estimation using FMCW radar,” in Proc. IEEE Int. Conf. Acoustics, Speech and Signal Processing, Beijing, China, 2016, pp. 2224–2228.
[58] T. Thayaparan, S. Abrol, and E. Riseborough, “Micro-Doppler radar signatures for intelligent target recognition,” DTIC Document, Tech. Rep., 2004.
[59] Y. Li, L. Du, and H. Liu, “Moving vehicle classification based on micro-Doppler signature,” in Proc. IEEE Int. Conf. Signal Processing, Communications and Computing, Xian, China, 2011, pp. 1–4.
[60] Advanced design system. [Online]. Available: http://www.keysight.com/en/ pc-1297113/advanced-design-system-ads
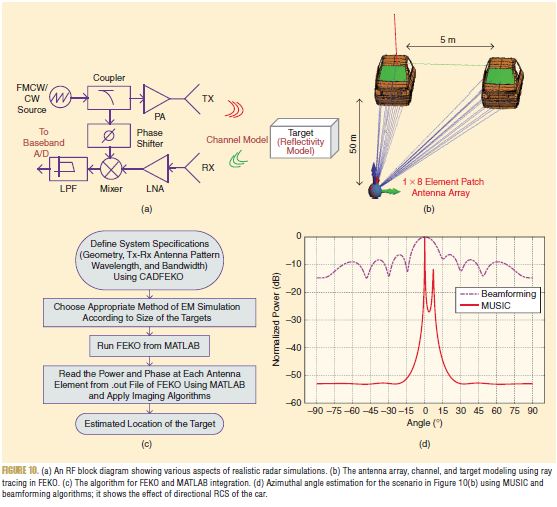
[61] Feko Homepage [Online]. Available: https://www.feko.info/
[62] D. Andersh, J. Moore, S. Kosanovich, D. Kapp, R. Bhalla, R. Kipp, T. Courtney, A. Nolan, F. German, J. Cook, and J. Hughes, “Xpatch 4: the next generation in high frequency electromagnetic modeling and simulation software,” in Proc. IEEE Radar Conf., Alexandria, VA, 2000, pp. 844–849.
[63] D. Göhring, M. Wang, M. Schnürmacher, and T. Ganjineh, “Radar/lidar sensor fusion for car-following on highways,” in Proc. Int. Conf. Automation, Robotics and Applications, Wellington, New Zealand, 2011, pp. 407–412.
[64] R. H. Rasshofer and K. Gresser, “Automotive radar and lidar systems for next generation driver assistance functions,” Adv. Radio Sci., vol. 3, pp. 205–209, May 2005.
[65] M. Mahlisch, R. Hering, W. Ritter, and K. Dietmayer, “Heterogeneous fusion of video, LIDAR and ESP data for automotive ACC vehicle tracking,” in Proc. IEEE Int. Conf. Multisensor Fusion and Integration for Intelligent Systems, Heidelberg, Germany, 2006, pp. 139–144.
[66] B. Steux, C. Laurgeau, L. Salesse, and D. Wautier, “Fade: A vehicle detection and tracking system featuring monocular color vision and radar data fusion,” in Proc. IEEE Intelligent Vehicle Symp., Versailles, France, 2002, vol. 2, pp. 632–639.
[67] P. Viola and M. Jones, “Robust real-time object detection,” Int. J. Comput. Vis., vol. 4, Feb. 2001.
[68] G. M. Brooker, “Mutual interference of millimeter-wave radar systems,” IEEE Trans. Electromagnet. Compat., vol. 49, no. 1, pp. 170–181, Feb. 2007.
[69] P. Papadimitratos, A. D. La Fortelle, K. Evenssen, R. Brignolo, and S. Cosenza, “Vehicular communication systems: Enabling technologies, applications, and future outlook on intelligent transportation,” IEEE Commun. Mag., vol. 47, no. 11, pp. 84–95, Nov. 2009.
[70] F. Ye, M. Adams, and S. Roy, “V2V wireless communication protocol for rear-end collision avoidance on highways,” in Proc. IEEE Int. Conf. Communication Workshop, Beijing, China, 2008, pp. 375–379.