This article presents a frank and open opinion on the challenges that will be faced in moving towards an electric mass transport ecosystem. World over there is considerable research activity on electric vehicles and hybrid electric vehicles. There seems to be a global effort to move from an ICE driven ecosystem to electric vehicle ecosystem. There is no simple means to make this transition. This road is filled with hurdles and challenges. This paper poses and discusses these challenges and possible solutions for enabling EVs.
Electric cars have been around since 1870s. It pre-dates the internal combustion engine (ICE) which came into being only after 1885. However, due to various factors, energy storage being one of them, the ICE quickly overtook the electric vehicle (EV). Although the electric propulsion was superior in many respects with respect to its ICE counterpart, the storage battery was no match for the high energy content, ease of handling and availability of petroleum fuel. The entire 20th century was the era of the ICE vehicles. Today, nearly more than a century later, the EVs are re-surfacing from obscurity. It appears that EVs may actually hold the key to the future transportation systems of the world. If one considers the decreasing fossil fuel reserves, rising population of people and automobiles, deteriorating environmental conditions due to ICE vehicle pollution; it appears that the ICE will gradually and eventually loose out to the electric engine. However, the transition from the ICE vehicle to EV will not be without difficulties. There are several challenges that need to be addressed before the transition is effective in a big way.
The increase of automobiles is directly coupled to the growth of population. The world population will grow up to 10 billion people by 2050 [1] and lead to increased energy demand for mass transportation. A significantly large proportion of national energy generated[2] is diverted to the transportation sector. This would impact the electric power sector demand. The national power sector generation is unable to meet the nation’s current electric demands. To this, if the transportation sector loads are converted as electric sector demands, the stress on the national electric power generation and distribution will be unimaginable.
Serious research on electric and hybrid electric vehicles began in the late seventies of the 20th century as an after effect of the oil crisis[3]. For quite some time now, hybrid electric vehicles have been considered as possible solutions to resolve the ICE to EV transition problem without having to reduce performance or range. Hybrid Electric Vehicles (HEV) will probably be the bridging technology between a completely petroleum-based transport system to a completely electric based transport system. This article discusses the electric vehicles and the challenges that this technology has to face in order to become a reality.
Electric vehicles in general have an electric motor as one of the prime movers that propel the wheels. It may be a single motor EV wherein the motor shaft is coupled to the wheels through a differential at the front or rear axle. Multi motor configurations are also possible wherein the motor is embedded within the wheel. Such motors are called in-wheel motors. The vehicle may be driven by both electric propulsion system and the ICE propulsion system. They are called parallel hybrid vehicles. The electric vehicles may be classified as (i) Zero Emission Vehicles (ZEV) or just Electric Vehicles (EVs) and (ii) low pollution vehicles or Hybrid Electric Vehicles (HEVs) [4]. Most electric vehicles use rechargeable batteries for energy storage. The batteries are the on-board storage devices for the EVs. On the other hand, a hybrid electric vehicle combines multiple energy storage sources. The hybrid electric vehicle can be broadly classified into the series hybrid and the parallel hybrid. In the series hybrid structure, the electric motor acts as the only torque source. A single motor may transmit the power to the wheels or several motors may be used. The in-wheel motors are generally less efficient due to higher torque requirements. The energy to drive the motors is obtained from multiple energy sources of different types. Figure 1 shows the general hybrid electric engine block schematic.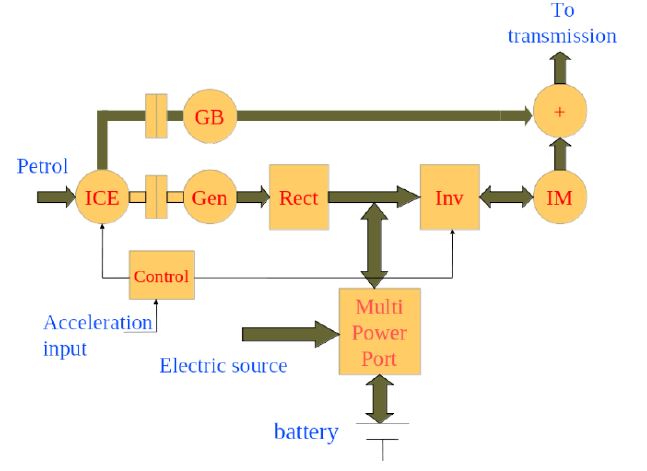
Figure 1: Generic hybrid electric engine
This is a general topology that will fit conventional ICE based propulsion, electric propulsion and hybrid electric propulsion systems. Referring to Figure 1, it can be seen that the conventional ICE vehicles use petrol or diesel as fuel input and the power from the ICE is transmitted to the transmission system comprising differential and wheels, through the gear box (GB). Only these parts of the block schematic comes into effect for conventional ICE vehicles. For electric vehciles (EV), battery bank, multiport power port, inverter, induction motor part of the block schematic is effective. The multi-power port converter is an important block which performs instantaneous power routing in EVs. When the vehicle is in motion, the power to drive the wheels flows from the stored energy in the battery bank through the multi-power port and then onto the inverter, followed by induction motor and transmission. When the EV which is in motion is required to brake, then the kinetic energy of the whole vehicle by virtue of the EV being in motion is decreased by passing the energy at the wheels to the battery through the induction motor, inverter and multipower port. It should be noted here that the induction motor will act as induction generator during this regenerative braking mode. The inverter and multi-power port should be capable of bi-directional power flow. When the EV is parked and put incharging mode, the power flow is from the electric source to the battery through the multi-power port.
In the case of hybrid electric vehicles, both petrol/diesel fuel and batteries are used as energy sources. In the case of series hybrid vehicles, the ICE is coupled to an electric generator or alternator. The output of the alternator is rectified and the power drawn from ICE and that drawn from battery are together used to drive the induction motor through the inverter. In parallel hybrid electric vehicles, the petrol, ICE, gear box (GB) parts of the system are used to drive one set of wheels and the battery, multi-power port, inverter and induction motor are used to drive another set of wheels. Here the electric generator or alternator and rectifier are not used. If even the electric generator and rectifier are used in a parallel hybrid topology, then it is called a combination hybrid. Here, during standstill condition when the vehicle is not in motion as in waiting for traffic signals, the ICE may be used to charge up the batteries. When the vehicle is parked, then the batteries can be charged from the electric grid source (wall outlet). If the EV or HEV can be charged from external power source, then such a vehicle is called plug-in EV (PEV) or plug-in HEV (PHEV) [5].
In both the parallel hybrid topology and the combination hybrid topology, the ICE engine is used as the steady state propulsion and the electric traction is used for dynamic propulsion. This is due to the rather sluggish reponse of the ICE engine as compared to the electric motor. If the electric motor handles the torque dynamics, then the ICE engine would handle the steady torque demand. This would mean that under these conditions, the ICE engine would see a highway like drive cycle even in a city drive. This would improve significantly the kilometre per litre ratio (mileage). As the electric motor is used as an auxillary drive to assist the power demand of the main ICE propulsion, this mode of operation is called the power assist mode. Here the battery size can be small as it needs to store just the amount of energy required for dynamical loading. If the electric drive becomes the primary propulsion system, then the ICE is used as an aid to extend the range of the vehicle and such mode of operation is called the range extender mode. The advantage of this control strategy is that most of the energy used is electrical which would reduce the overall emissions at the wheels. Further, as the electric motor is rated to handle the starting torque conditions of the vehicle, the need for a separate starter motor is avoided as the vehicle is in motion when the ICE is required to be turned on.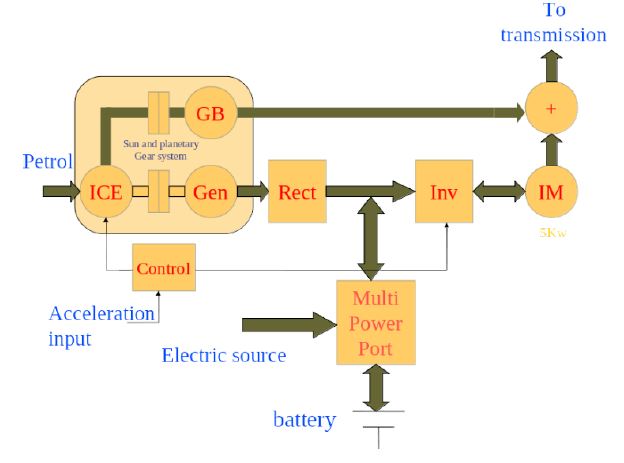
Figure 2: Combination hybrid with planetary gear train
In the power assist mode of operation, the ICE is operated in its most efficient region of its torque-speed characteristics thereby reducing full-throttle emissions. The electric motor provides the fluctuating torque requirements like acceleration conditions. In the parallel hybrid topology, the generator and rectifier are absent and therefore the battery cannot be charged directly by the ICE when at standstill. However, under running conditions, the battery can be charged through regeneration from the wheels during down-hill driving and braking conditions. It should be noted that compared to the range extender mode of operation, the battery size requirements for the power assist mode of operation is very small as the battery needs to act as only a buffer to supply peak load demand.
One could also achieve battery charging from the ICE during standstill conditions by introducing a planetary gear set and connecting a generator to it as shown in Figure 2. While the vehicle is in standstill, the ICE will drive the generator through the planetary gear set. The generator will in turn charge up the battery. A topology similar to this has been used in the Toyota Prius hybrid electric vehicle.
One of the significant advantages of either the EVs or the HEVs over the conventional ICE vehicle is the inherent bi-directionality of the power flow. An EV propulsion can convert energy stored in the batteries into vehicle motion just like the conventional (ICE) vehicles, further it can also convert the kinetic energy of the vehicle in motion back into electrical energy that can be stored in the battery during braking. This is referred to as regenerative braking which is not a feature in ICE vehicles. The significance of regeneration becomes apparent when one considers a typical city drive cycle.
Figure 3 shows a typical vehicle drive cycle in Bangalore city. It is the vehicle velocity versus time. In a high density city traffic, this velocity versus time profile is fairly independent of the type and power of the vehicle. The vehicle velocity is governed by the city traffiic and not by the vehicle torquecapability. The average speed is less than 15 kmph, but it will vary with trafic condictions. However, it is evident that a major portion of the city drive cycle consists of acceleration and deceleration. In a conventional ICE vehicle, the energy during deceleration is lost as heat while braking, as most braking mechanisms are based on friction principle. Whereas, in EV or HEV, during deceleration, the kinetic energy is not wasted but is instead put back into the storage device (like battey). This is known as regenerative braking mechanism. In comparison to the internal combustion engine, an electric motor is relatively a simpler and far more efficient machine. Moving parts consist primarily of the motor shaft and bearings. The motoring efficiency is typically in excess of 85%. In addition, the electric motor torque characteristics are more compatible with the load demand than the torque characteristic of the ICE. A vehicle needs high torque at low speeds for acceleration and demands less torque during cruising. An electric motor develops high torque even at low rpm, and the torque decreases with speed, in step with the vehicle’s load demand. In contrast, an ICE develops very little torque at low speed and must accelerate through nearly 80% of its maximum speed before it can deliver maximum torque. A multi-ratio geared transmission is therefore necessary in order to correctly match ICE output characteristics to the vehicle load demand curve. As a consequence an EV drive train usually needs just one fixed gear ratio eliminating the need for changing the gear ratios while running. Further, a reverse gear is unnecessary because the rotational direction of the motor itself can be reversed simply by electrical polarity reversal. These advantages lead to a far less complex and more efficient propulsion system.
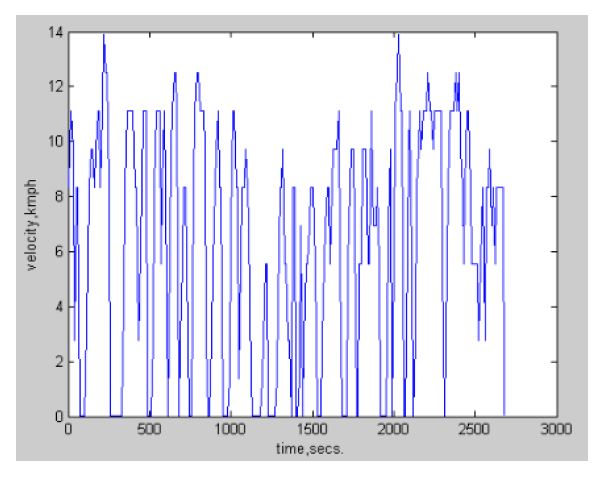
Figure 3: City drive cycle
The main and possibly only significant disadvantage of the EV over ICE vehicles is the very low energy density of its storage systems (battery, flywheel, ultracap). This reflects in limited range of the vehicle. This along with long re-fuel or re-charge time form one of the major challenges toward EV transition. In this context, the HEVs can be considered as technological solution that will provide the bridge between ICE vehicles and the EVs.
Figure 4 and 5 provide a comparison of the energy budget of EVs as compared to ICE vehicles. A running vehicle must develop sufficient propulsion torque in order to overcome road loads viz. (i) acceleration load, (ii) rolling resistance load, (iii) climbing or gradient load, and (iv) air drag load. A typical vehicle having a mass, along with payload of 1000 kg undergoing the city drive cycle (like in Bangalore) will have an energy efficiency of about 16%. This means that for every 100 Wh of energy delivered to the wheels, 500 Wh goes off as engine losses and another 20 Wh go off as transmission losses. The input energy requirement is 620 Wh. If petrol is used as the input fuel, it will work out to 0.065 litres of petrol.
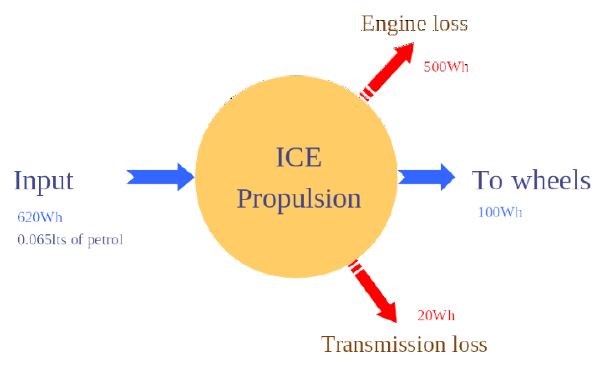
Figure 4: ICE energy budget
On the other hand, in the case of EVs, for every 100 Wh of energy delivered to the wheels, around 40 Wh is lost in charge-discharge loss of batteries and another 20 Wh is lost as transmission loss. This mean that 160 Wh is needed as input energy. In the case of EVs and HEVs, during braking, there is energy recovery of about 4% i.e. 4 Wh. This is recovered back. Therefore, the net input energy required is 156 Wh. This works out to a system energy efficiency of 64%. The energy budget for EVs is shown in Figure 5.
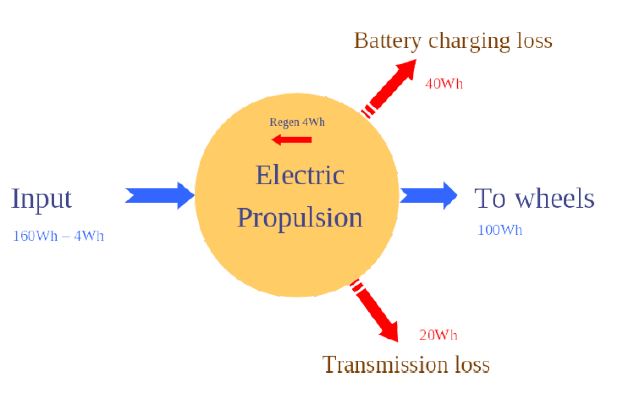
Figure 5: EV energy budget
A vehicle should have a stored energy source on-board in order to enable it to move. In the case of ICE vehicles, the stored energy source is the fuel in the form of petrol or diesel. In the case of EVs, the storage device is the battery. Though these are the more common storage mechanisms, there have been vehicles using flywheel storage and compressed air. The onboard stored energy source will infact determine the range of the vehicle before every re-fill or re-charge. The energy density parameter of the fuel or source will impact the size and weight of the vehicle for a given range. Table 1 gives typical values of energy densities for various energy storage devices. The energy density of gasoline is about 12.3 kWh/kg. Most fossil fuel based energy storage systems have energy densities on the order of 10 kWh/kg. On the other hand, the conventional lead-acid batteries have very poor energy densities of about 35 Wh/kg which is about 400 times less than gasoline. Even allowing for the low efficiency of internal combustion engines, this is a huge difference. As a result, energy density has historically been the driving concern and primary challenge for electric vehicles.
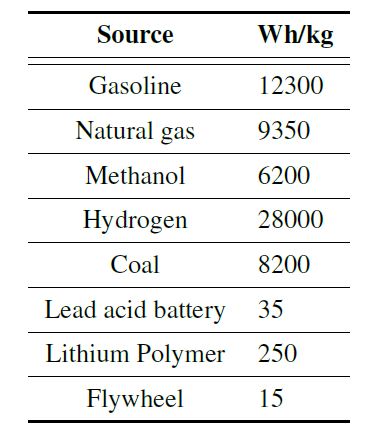
Table 1: Energy density comparison
One should note that even though the lead acid batteries have very low energy densities, their manufacturing techniques are highly matured and the key electrochemical components (lead and sulfuric acid) are inexpensive. For EV applications, the deep discharge tubular lead acid batteries are the ones to be used. Nickel-metal hydride (NiMH) batteries have about 50 percent higher energy densitiy than lead-acid batteries and EVs using them can be expected to have a greater range. The lithium-based batteries offer the best long-term hope for commercially practical vehicles. One can also see that hydrogen has a very high energy density. Fuel cells based on hydrogen are being tried for commercially viable storage solutions. It should be noted that hydrogen is also the lightest element and therefore, at standard temperature and pressure, 1 kg will have a very large volume as compared to petrol. This implies that hydrogen must be compressed and used under pressure leading to additional technological complexities and cost. Currently, the least expensive storage solution is lead acid batteries (albiet low grade performance) and the most expensive is hydrogen based solutions. Storage solutions are continuously
evolving and this challenge is yet to be resolved satisfactorily.
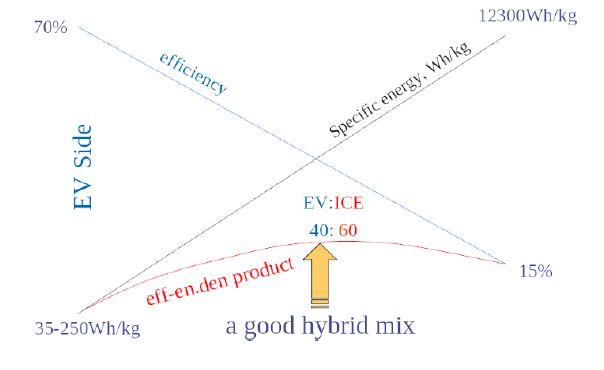
Figure 6: Efficiency – energy density product
Figure 6 gives an interesting conclusion on the feasibility of EVs and ICE vehicles. The figure shows one line indicating the energy density of storage components. On the EV side the energy density of batteries hovers around 35-250 Wh/kg, and on the other side (ICE), the energy density of the fossil fuels are around 12000 Wh/kg. Another line called the energy efficiency line is at around 70% on the EV side and around 15% on the ICE side. These two aspects contradict each other leading to the possibility of an optimal mix. Today, it would probably make sense to have a HEV which demands 40% electric storage and 60% fossil fuel storage on-board. This probably would be a good mix to start off with. Eventually, as technology of electric storage systems improve, the dependence on petrol/diesel fuels can gradually be reduced.
Apart from the issue of energy density, there is another serious challenge related to refueling or recharging that is not yet satisfactorily resolved. In conventional ICE vehicles, at the end of range, the infrastructure of refueling stations and pumps are available wherein the ICE vehicles will stop to refuel. On an average the refuelling time will be around 5 minutes per car. This may vary to some extent with city traffic and highway traffic conditions. However, in the case of EVs, infrastructure is not yet established for recharging the batteries or swapping the batteries. The existing ICE refuel stations with some modifications can double as battery recharge or swap stations in order to cater to EVs too. The batteries require to be charged in a controlled manner. The recharge times would be in the order of 4 to 5 hours. There are fast charge solutions that have also been proposed. However, in a country like India, the electric grid is a supply-deficit grid. This means that electric load demand is more than supply. Hypothetically, if to this supply-deficit electric grid, the massive transport loads are also included by way of battery recharge for milliions of vehicles throughout the country, the national power grid can become unstable. Daytime fast charging may not be appropriate solutions here.
If the batteries are pre-charged under controlled conditions and lean electric demand conditions, then swaping the discharged batteries for pre-charged ones can be a possible long term solution. The refuel stations can offer such battery swap services. Battery swap approach itself will throw up several challenges. Detecting the best time to pre-charge the batteries in a controlled manner is one area of work that needs to be resolved. Monitoring the state of health of the batteries continuously and updating the info within a RF tag embedded on the battery will provide useful information and tariff control while performing the swap. This is an interesting area to research on.
The electric traction is provided by the combination of electric motor and drive control algorithm. The permanent magnet based motors, reluctance based motors and induction motors have emerged as front-runners for the choice of motors for EVs and HEVs. At very high power scale applications like locomotive traction, induction motors are by and large the popular choice. They are rugged machines with very little or no maintenance. The low power applications seem to prefer the permanent magnet based motors. They are compact and efficient. Recently much research is happening in switched reluctance and synchronous reluctance motors. The permanent magnet motors are very compact, but suffer from the drawback of rare-earth material availability. Rare-earth material is needed to make permanent magnets and these are available in very few countries. Therefore, much of the research work on electric motors specifically for EVs use either the induction machine approach or the synchronous reluctance approach. Future electric vehicles will eventually use either one of these type of motors.
Drive control is generally based on the high dynamic performance vector control approach[6]. The field oriented control based on d-q axes theory has evolved to some degree of maturity and is now the most preferred type of motor control. This approach is applicable to induction machines, permanent magnet machines and reluctance machines too. In the drive control domain, one of the main challenges that need to be resolved is self-commissioning. The motor parameters may vary with time, loading and environmental conditions. Apart from this, the motors may be swapped for repairs and maintenance. Therefore, the drive controller should be able to self-commission for any motor under all such circumstances.
EVs and HEVs are complex systems comprising of interdisciplinary domains. The challenges for EVs and HEVs span multiple disciplines. Core engineering disciplines like energy, electrical and mechanical are central to EV and HEV design. Power electronics with special emphasis on machine control and drives are essential to handle e-engine or e-propulsion development. Drive control algorithms for vector control of induction machines and permanent magnet machines are very mature now. However, there are robustness challenges in this specific context like machine parameter changes due to machine replacement and maintenance. This need to be addressed satisfactorily. Issues related to energy storage is a vast topic that needs a major research outlook. This is one aspect that needs to be satisfactorily addressed before any meaningful ICE to EV transition happens. At the national grid level, the energy chain budget for the EV from source to wheels need to be looked and challenges regarding the nature of source to be used from the point of view of pollution and fossil fuel reserves should be explored and addressed. There are several challenges on the IoT front too. Issues related to IoT enable steering for fully automatic and/or assisted steering have many applications in future. Assisted steering sees lot of potential to avoid accidents due to driver fatigue/sleep while driving. Auto-steering has lot of potential in synchronised fleet management and also traffic management of vehicles at busy junctions. Vehicle fleet management algorithms can reduce the time spent in waiting at traffic junctions. IoT can also play a role in inter-vehicle communication for collision avoidance. Several such relevant applications can be thought of where IoT can play a nice role of integrating power electronics, mechanical devices and sensors.
Both the EVs and the ICE vehicles have pros and cons. World transportation will eventually and inevitably move more and more towards electric drive. However, one school of thought feels that eventually a realistic transport eco-system would stabilise with both electric propulsion and petrol/diesel propulsion.
In India, more than 75% of electric power comes from fossil fuel based thermal power stations. This same converted fossil fuel energy is the one that will eventually charge the batteries and drive the electric propulsion based EVs. The energy chain efficiency considers the efficiency of coal extraction and transportation, thermal boiler efficiency, turbine efficiency, transmission and distribution efficiency, battery charging efficiency and the electric propulsion efficiency upto the wheel load demand. In the case of ICE vehicles, the petrol/diesel fossil fuel is delivered to the vehicles as fuel. Here, the energy chain efficiency considers the efficiency of petrol/diesel extraction, fuel transportation and distribution and internal combustion engine efficiency upto the wheels. Considering the energy chain efficiencies from the source to wheels, both EVs and ICE show no significant advantage over the other. Moving to EV mode of transport in the large scale would make sense only if the primary energy source that is used to ultimately charge the batteries and run the EVs is truely a renewable energy source not dependent on fossil based reserves. In this regard, one may ponder that under the current electric power generation situation in the country the one signinant advantage to shift over to the EV mode of transport is that pollution sources are centralised and easily controllable. Whereas, in the case of ICE scenario, each vehicle is a pollution source and consequently more difficult to regulate. In order to make a deep impactful shift from ICE to EVs, the entire country’s power generation must move towards renewable generation and only such green power should be used to power the EVs. This is a very serious challenge.
Another challenge that needs to be effectively addressed is “what happens to the existing ICE vehicles on the roads?”. There are millions of 2, 3 and 4 wheelers on the roads currently using ICE. One cannot just abandon or throw them away. Physical vehicle archival process is not easy if not impossible. One needs to address this by providing “retrofit” solutions that will seamlessly transfer existing ICE vehicles to HEVs and then on to EVs. This probably may be the only way to address such a mammoth challenge.
Batteries and battery charging is an important challenge that needs to be addressed if the EV eco system is to take off. The batteries have energy densities hovering around 250 Wh/kg and power densities around 200 W/kg. Both are much less compared to fossil fuel storage. Higher energy density would imply greater range and higher power density would mean greater acceleration capability. Ultra capacitors have very high power densities but low energy densities. One can use an eutectic combination of different battery types and/or batteries with ultra capacitors to improve the performance parameters of the storage system.
Fast charging of batteries may not be a feasible or realistic solution as the power generation is not commensurate with the transport sector demand. Further, most power generation in the country is based on fossil fuel and therefore should not be used for EV battery charging. Slow charging through photovoltaic arrays at parking lots is one possible solution. Charging batteries from grid at lean load demands should be attempted. If the power generation and load demand does not match, there will be power grid stability issues. An interesting challenge is to use the EV batteries connected to the grid through the charger units as VAR compensators for stabilising the grid. Battery charging should co-exist with battery swapping at the re-charge stations. In order to avoid long queues at the recharge stations, battery swapping will become an inevitable technology for EV eco system. Estimating the state of health of the battery pack is very important, but a difficult challenge to address. This is important as energy pricing and tariffs for battery swapping will be determined based on this estimate. Number of charge-discharge cycles of the battery is a history parameter that needs to be transmitted across swaps. Technology for this storage and retrieval of battery history data needs to be addressed in a robust manner.
In conclusion, it may be said that walking is the best mode of transport. For any energy output delivered from a system, the amount of energy required at the input will always be greater, as a part of the input energy is lost as irrecoverable heat energy. This is a universal law occurring in all systems, simple and complex. Moving over to an EV eco system from an ICE eco system will not solve the problems of pollution and deteriorating environmental conditions, without effort from our side to change the way we live. We have been over-consuming energy and natural resources for quite some time now. We should live with an awareness of energy conservation. The most efficient means of transport is that which is already provided by nature i.e. muscle power of humans and animals. One may start with adopting simple changes to life style like move into residences near ones work place. This will solve most transport issues and go a long way towards better quality of life.
[1] Wikipedia contributors. Projections of population growth — Wikipedia, the free encyclopedia, 2018. [Online; accessed 10-November 2018].
[2] I.Pinna, B.Dalla Chiara, and K.Pant. Energy used by transport systems in india: the role of the urban population, sources, alternative modes and quantitative analyses. WIT Transactions on Ecology and the Environment, 190:661–675, 2014.
[3] Wikipedia contributors. 1970s energy crisis — Wikipedia, the free encyclopedia, 2018. [Online; accessed 10-November-2018].
[4] G Gruosso. Optimization and management of energy power flow in hybrid electrical vehicles. In 5th IET Hybrid and Electric Vehicles Conference (HEVC 2014), pages 1–4, 2014.
[5] Phillip Kollmeyer, Mackenzie Wootton, John Reimers, Tyler Stiene, Ephrem Chemali ; Megan Wood, and Ali Emadi. Optimal performance of a full scale li-ion battery and li-ion capacitor hybrid energy storage system for a plug-in hybrid vehicle. In IEEE Energy Conversion Congress and Exposition (ECCE), pages 572–577, 2017.
[6] T Bhattacharya and L Umanand. Improved flux estimation and stator-resistance adaptation scheme for sensorless control of induction motor. In IEE Proceedings, Electric Power Applications, volume 153, pages 911–920, 2006.